#include </builds/gaudi/Gaudi/GaudiHive/src/PRGraph/PrecedenceRulesGraph.h>
Definition at line 195 of file PrecedenceRulesGraph.h.
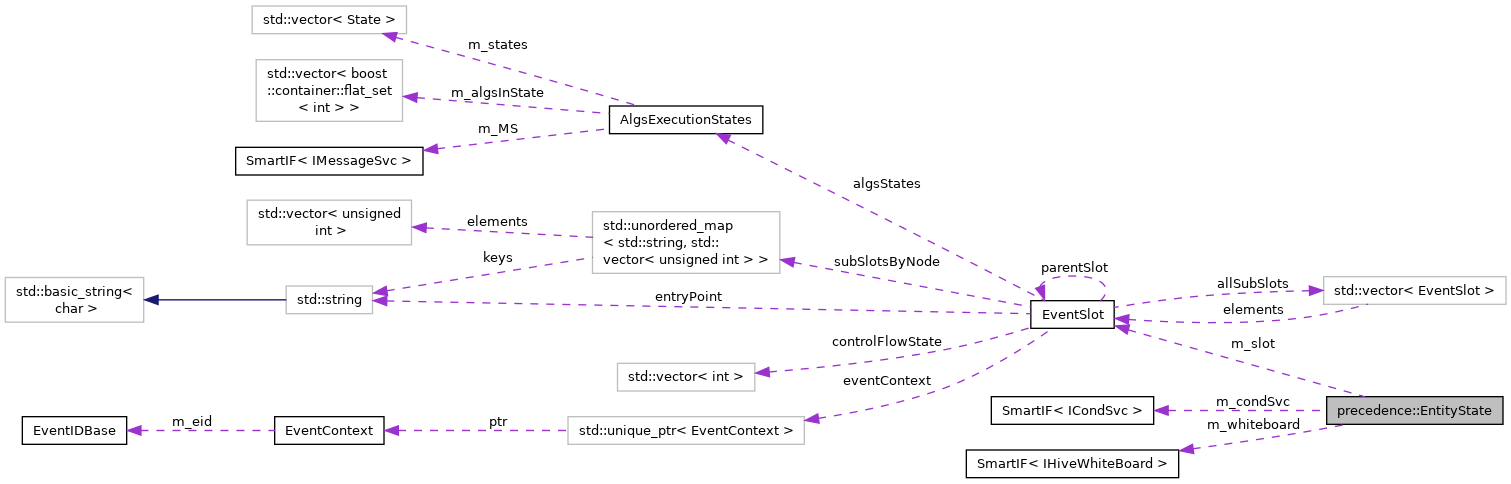
◆ EntityState()
◆ operator()() [1/4]
| std::string precedence::EntityState::operator() |
( |
const AlgoProps & |
props | ) |
const |
|
inline |
◆ operator()() [2/4]
| std::string precedence::EntityState::operator() |
( |
const CondDataProps & |
props | ) |
const |
|
inline |
◆ operator()() [3/4]
| std::string precedence::EntityState::operator() |
( |
const DataProps & |
props | ) |
const |
|
inline |
◆ operator()() [4/4]
| std::string precedence::EntityState::operator() |
( |
const DecisionHubProps & |
| ) |
const |
|
inline |
◆ m_conditionsEnabled
| bool precedence::EntityState::m_conditionsEnabled { false } |
◆ m_condSvc
◆ m_slot
| const EventSlot& precedence::EntityState::m_slot |
◆ m_whiteboard
The documentation for this struct was generated from the following file:
 1.8.18
1.8.18