|
The Gaudi Framework
master (29688f1e)
|
|
The Gaudi Framework
master (29688f1e)
|
#include </builds/gaudi/Gaudi/GaudiHive/src/PRGraph/PrecedenceRulesGraph.h>
Public Member Functions | |
| DecisionNode (PrecedenceRulesGraph &graph, unsigned int nodeIndex, const std::string &name, Concurrent modeConcurrent, PromptDecision modePromptDecision, ModeOr modeOR, AllPass allPass, Inverted isInverted) | |
| Constructor. | |
| bool | accept (IGraphVisitor &visitor) override |
| Visitor entry point. | |
| void | addParentNode (DecisionNode *node) |
| Add a parent node. | |
| void | addDaughterNode (ControlFlowNode *node) |
| Add a daughter node. | |
| const std::vector< ControlFlowNode * > & | getDaughters () const |
| Get children nodes. | |
| void | printState (std::stringstream &output, EventSlot &slot, const unsigned int &recursionLevel) const override |
| Print a string representing the control flow state. | |
| Public Member Functions inherited from concurrency::ControlFlowNode | |
| ControlFlowNode (PrecedenceRulesGraph &graph, unsigned int nodeIndex, const std::string &name) | |
| Constructor. | |
| virtual | ~ControlFlowNode ()=default |
| Destructor. | |
| const unsigned int & | getNodeIndex () const |
| Get node index. | |
| const std::string & | name () const |
| Get node name. | |
Public Attributes | |
| bool | m_modeConcurrent |
| Whether all daughters will be evaluated concurrently or sequentially. | |
| bool | m_modePromptDecision |
| Whether to evaluate the hub decision ASA its child decisions allow to do that. | |
| bool | m_modeOR |
| Whether acting as "and" (false) or "or" node (true). | |
| bool | m_allPass |
| Whether always passing regardless of daughter results. | |
| bool | m_inverted { false } |
| Whether the selection result is negated or not. | |
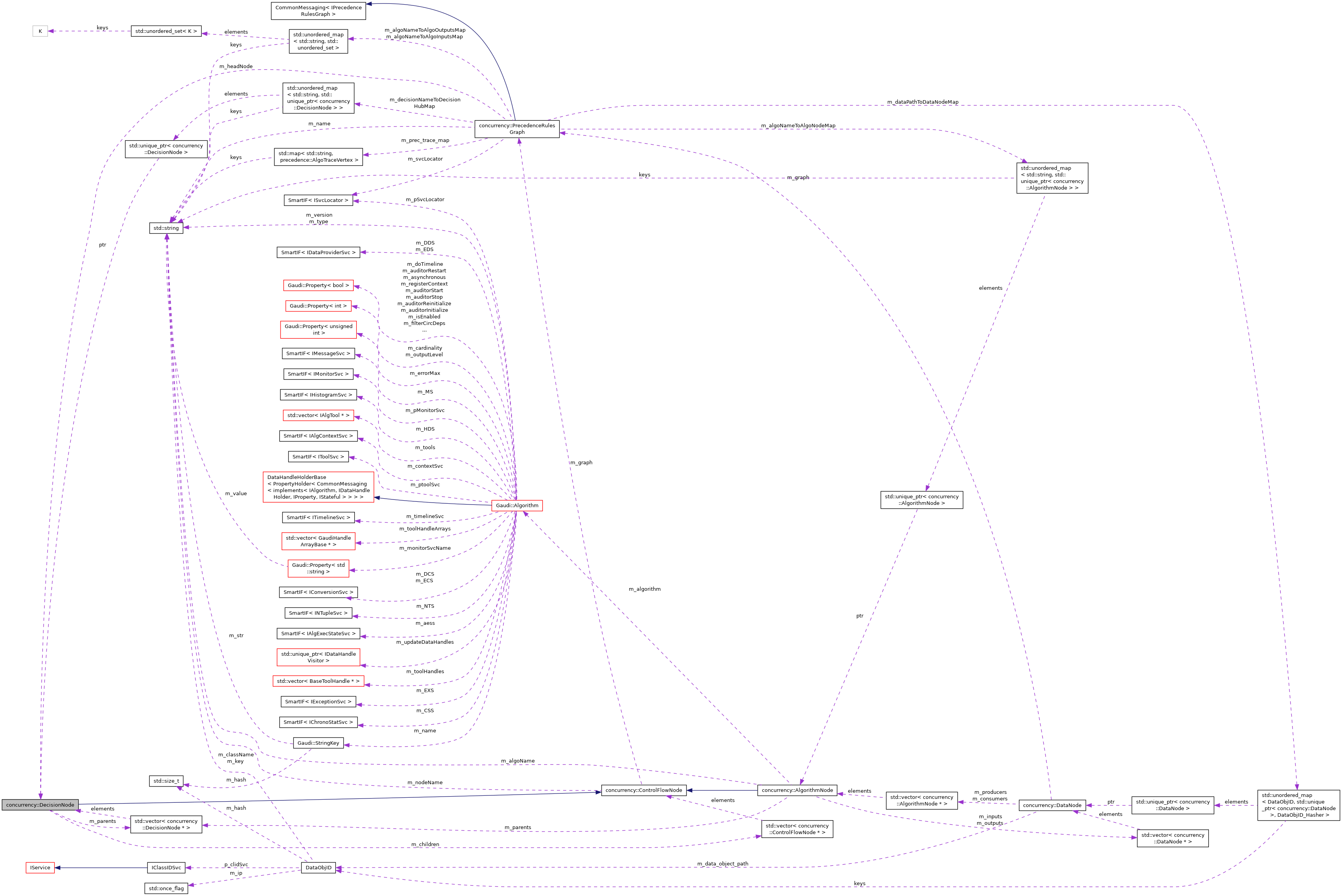
| std::vector< ControlFlowNode * > | m_children |
| All direct daughter nodes in the tree. | |
| std::vector< DecisionNode * > | m_parents |
| Direct parent nodes. | |
| Public Attributes inherited from concurrency::ControlFlowNode | |
| PrecedenceRulesGraph * | m_graph |
Additional Inherited Members | |
| Protected Attributes inherited from concurrency::ControlFlowNode | |
| unsigned int | m_nodeIndex |
| std::string | m_nodeName |
Definition at line 440 of file PrecedenceRulesGraph.h.
|
inline |
Constructor.
Definition at line 443 of file PrecedenceRulesGraph.h.
|
overridevirtual |
Visitor entry point.
Implements concurrency::ControlFlowNode.
Definition at line 65 of file PrecedenceRulesGraph.cpp.
| void concurrency::DecisionNode::addDaughterNode | ( | ControlFlowNode * | node | ) |
Add a daughter node.
Definition at line 47 of file PrecedenceRulesGraph.cpp.
| void concurrency::DecisionNode::addParentNode | ( | DecisionNode * | node | ) |
Add a parent node.
Definition at line 41 of file PrecedenceRulesGraph.cpp.
|
inline |
|
overridevirtual |
Print a string representing the control flow state.
Implements concurrency::ControlFlowNode.
Definition at line 53 of file PrecedenceRulesGraph.cpp.
| bool concurrency::DecisionNode::m_allPass |
Whether always passing regardless of daughter results.
Definition at line 473 of file PrecedenceRulesGraph.h.
| std::vector<ControlFlowNode*> concurrency::DecisionNode::m_children |
All direct daughter nodes in the tree.
Definition at line 477 of file PrecedenceRulesGraph.h.
| bool concurrency::DecisionNode::m_inverted { false } |
Whether the selection result is negated or not.
Definition at line 475 of file PrecedenceRulesGraph.h.
| bool concurrency::DecisionNode::m_modeConcurrent |
Whether all daughters will be evaluated concurrently or sequentially.
Definition at line 466 of file PrecedenceRulesGraph.h.
| bool concurrency::DecisionNode::m_modeOR |
Whether acting as "and" (false) or "or" node (true).
Definition at line 471 of file PrecedenceRulesGraph.h.
| bool concurrency::DecisionNode::m_modePromptDecision |
Whether to evaluate the hub decision ASA its child decisions allow to do that.
Applicable to "sequential" hub only.
Definition at line 469 of file PrecedenceRulesGraph.h.
| std::vector<DecisionNode*> concurrency::DecisionNode::m_parents |
Direct parent nodes.
Definition at line 479 of file PrecedenceRulesGraph.h.