|
The Gaudi Framework
v33r1 (b1225454)
|
|
The Gaudi Framework
v33r1 (b1225454)
|
#include <src/PRGraph/PrecedenceRulesGraph.h>
Public Member Functions | |
| AlgorithmNode (PrecedenceRulesGraph &graph, Gaudi::Algorithm *algoPtr, unsigned int nodeIndex, unsigned int algoIndex, bool inverted, bool allPass) | |
| Constructor. More... | |
| bool | accept (IGraphVisitor &visitor) override |
| Visitor entry point. More... | |
| void | addParentNode (DecisionNode *node) |
| Add a parent node. More... | |
| const std::vector< DecisionNode * > & | getParentDecisionHubs () const |
| Get all parent decision hubs. More... | |
| void | addOutputDataNode (DataNode *node) |
| Associate an AlgorithmNode, which is a data supplier for this one. More... | |
| void | addInputDataNode (DataNode *node) |
| Associate an AlgorithmNode, which is a data consumer of this one. More... | |
| const std::vector< DataNode * > & | getOutputDataNodes () const |
| Get all supplier nodes. More... | |
| const std::vector< DataNode * > & | getInputDataNodes () const |
| Get all consumer nodes. More... | |
| void | setRank (float &rank) |
| Set Algorithm rank. More... | |
| const float & | getRank () const |
| Get Algorithm rank. More... | |
| Gaudi::Algorithm * | getAlgorithm () const |
| get Algorithm representatives More... | |
| const unsigned int & | getAlgoIndex () const |
| Get algorithm index. More... | |
| void | setIOBound (bool value) |
| Set the I/O-boundness flag. More... | |
| bool | isIOBound () const |
| Check if algorithm is I/O-bound. More... | |
| bool | isOptimist () const |
| Check if positive control flow decision is enforced. More... | |
| bool | isLiar () const |
| Check if control flow logic is always inverted. More... | |
| void | printState (std::stringstream &output, EventSlot &slot, const unsigned int &recursionLevel) const override |
| Print a string representing the control flow state. More... | |
 Public Member Functions inherited from concurrency::ControlFlowNode Public Member Functions inherited from concurrency::ControlFlowNode | |
| ControlFlowNode (PrecedenceRulesGraph &graph, unsigned int nodeIndex, const std::string &name) | |
| Constructor. More... | |
| virtual | ~ControlFlowNode ()=default |
| Destructor. More... | |
| const unsigned int & | getNodeIndex () const |
| Get node index. More... | |
| const std::string & | name () const |
| Get node name. More... | |
Public Attributes | |
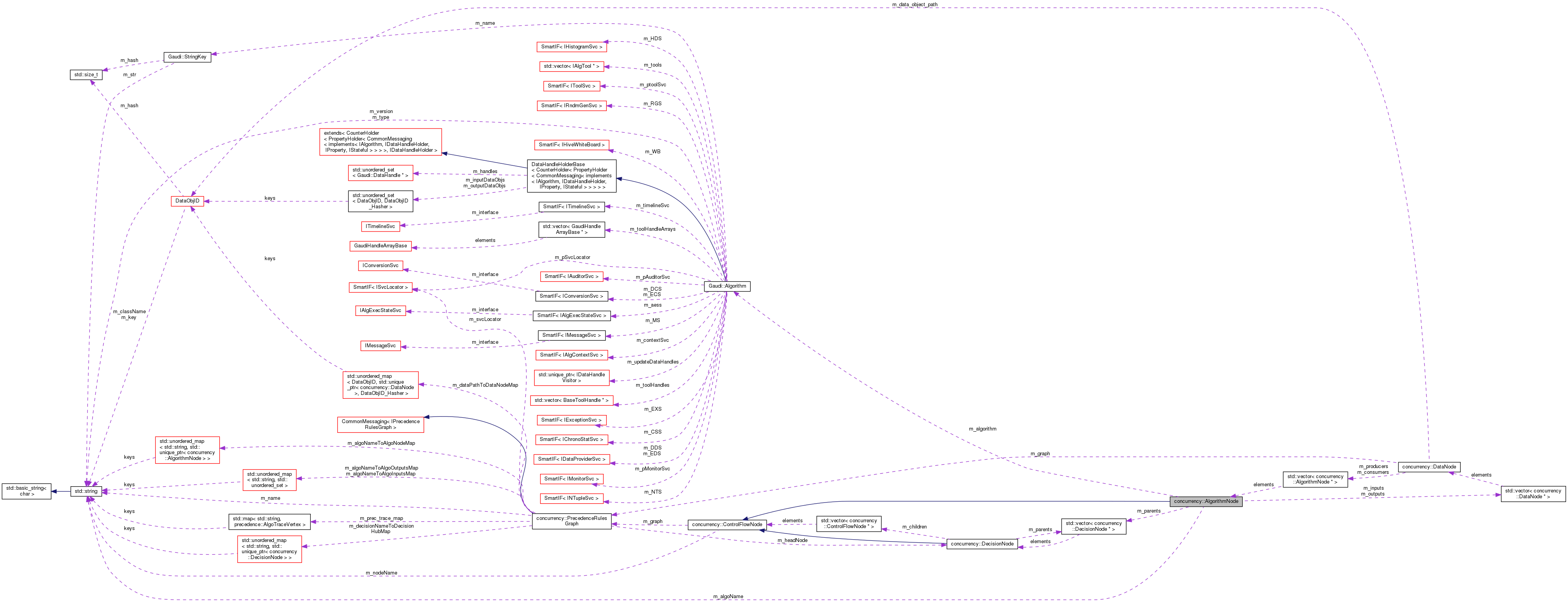
| std::vector< DecisionNode * > | m_parents |
| Control flow parents of an AlgorithmNode (DecisionNodes) More... | |
| Public Attributes inherited from concurrency::ControlFlowNode | |
| PrecedenceRulesGraph * | m_graph |
Private Attributes | |
| Gaudi::Algorithm * | m_algorithm |
| Algorithm representative behind the AlgorithmNode. More... | |
| unsigned int | m_algoIndex |
| The index of the algorithm. More... | |
| std::string | m_algoName |
| The name of the algorithm. More... | |
| bool | m_inverted |
| Whether the selection result is negated or not. More... | |
| bool | m_allPass |
| Whether the selection result is relevant or always "pass". More... | |
| float | m_rank = -1 |
| Algorithm rank of any kind. More... | |
| bool | m_isIOBound |
| If an algorithm is blocking. More... | |
| std::vector< DataNode * > | m_outputs |
| Algorithm outputs (DataNodes) More... | |
| std::vector< DataNode * > | m_inputs |
| Algorithm inputs (DataNodes) More... | |
Additional Inherited Members | |
| Protected Attributes inherited from concurrency::ControlFlowNode | |
| unsigned int | m_nodeIndex |
| std::string | m_nodeName |
Definition at line 485 of file PrecedenceRulesGraph.h.
|
inline |
Constructor.
Definition at line 488 of file PrecedenceRulesGraph.h.
|
overridevirtual |
Visitor entry point.
Implements concurrency::ControlFlowNode.
Definition at line 190 of file PrecedenceRulesGraph.cpp.
| void concurrency::AlgorithmNode::addInputDataNode | ( | DataNode * | node | ) |
Associate an AlgorithmNode, which is a data consumer of this one.
Definition at line 213 of file PrecedenceRulesGraph.cpp.
| void concurrency::AlgorithmNode::addOutputDataNode | ( | DataNode * | node | ) |
Associate an AlgorithmNode, which is a data supplier for this one.
Definition at line 207 of file PrecedenceRulesGraph.cpp.
| void concurrency::AlgorithmNode::addParentNode | ( | DecisionNode * | node | ) |
Add a parent node.
Definition at line 201 of file PrecedenceRulesGraph.cpp.
|
inline |
Get algorithm index.
Definition at line 523 of file PrecedenceRulesGraph.h.
|
inline |
get Algorithm representatives
Definition at line 521 of file PrecedenceRulesGraph.h.
|
inline |
Get all consumer nodes.
Definition at line 513 of file PrecedenceRulesGraph.h.
|
inline |
Get all supplier nodes.
Definition at line 511 of file PrecedenceRulesGraph.h.
|
inline |
Get all parent decision hubs.
Definition at line 504 of file PrecedenceRulesGraph.h.
|
inline |
Get Algorithm rank.
Definition at line 518 of file PrecedenceRulesGraph.h.
|
inline |
Check if algorithm is I/O-bound.
Definition at line 528 of file PrecedenceRulesGraph.h.
|
inline |
Check if control flow logic is always inverted.
Definition at line 533 of file PrecedenceRulesGraph.h.
|
inline |
Check if positive control flow decision is enforced.
Definition at line 531 of file PrecedenceRulesGraph.h.
|
overridevirtual |
Print a string representing the control flow state.
Implements concurrency::ControlFlowNode.
Definition at line 76 of file PrecedenceRulesGraph.cpp.
|
inline |
Set the I/O-boundness flag.
Definition at line 526 of file PrecedenceRulesGraph.h.
|
inline |
Set Algorithm rank.
Definition at line 516 of file PrecedenceRulesGraph.h.
|
private |
The index of the algorithm.
Definition at line 546 of file PrecedenceRulesGraph.h.
|
private |
The name of the algorithm.
Definition at line 548 of file PrecedenceRulesGraph.h.
|
private |
Algorithm representative behind the AlgorithmNode.
Definition at line 544 of file PrecedenceRulesGraph.h.
|
private |
Whether the selection result is relevant or always "pass".
Definition at line 552 of file PrecedenceRulesGraph.h.
|
private |
Algorithm inputs (DataNodes)
Definition at line 561 of file PrecedenceRulesGraph.h.
|
private |
Whether the selection result is negated or not.
Definition at line 550 of file PrecedenceRulesGraph.h.
|
private |
If an algorithm is blocking.
Definition at line 556 of file PrecedenceRulesGraph.h.
|
private |
Algorithm outputs (DataNodes)
Definition at line 559 of file PrecedenceRulesGraph.h.
| std::vector<DecisionNode*> concurrency::AlgorithmNode::m_parents |
Control flow parents of an AlgorithmNode (DecisionNodes)
Definition at line 540 of file PrecedenceRulesGraph.h.
|
private |
Algorithm rank of any kind.
Definition at line 554 of file PrecedenceRulesGraph.h.
 1.8.15
1.8.15