|
The Gaudi Framework
v30r0 (c919700c)
|
|
The Gaudi Framework
v30r0 (c919700c)
|
#include <src/PrecedenceRulesGraph.h>
Public Member Functions | |
| PrecedenceRulesGraph (const std::string &name, SmartIF< ISvcLocator > svc) | |
| Constructor. More... | |
| ~PrecedenceRulesGraph () override | |
| Destructor. More... | |
| StatusCode | initialize () |
| Initialize graph. More... | |
| void | accept (const std::string &algo_name, IGraphVisitor &visitor) const |
| A method to update algorithm node decision, and propagate it upwards. More... | |
| StatusCode | addDataNode (const DataObjID &dataPath) |
| Add DataNode that represents DataObject. More... | |
| DataNode * | getDataNode (const DataObjID &dataPath) const |
| Get DataNode by DataObject path using graph index. More... | |
| void | registerIODataObjects (const Algorithm *algo) |
| Register algorithm in the Data Dependency index. More... | |
| StatusCode | buildDataDependenciesRealm () |
| Build data dependency realm WITH data object nodes participating. More... | |
| void | addHeadNode (const std::string &headName, concurrency::Concurrent, concurrency::PromptDecision, concurrency::ModeOr, concurrency::AllPass, concurrency::Inverted) |
| Add a node, which has no parents. More... | |
| DecisionNode * | getHeadNode () const |
| Get head node. More... | |
| StatusCode | addAlgorithmNode (Algorithm *daughterAlgo, const std::string &parentName, bool inverted, bool allPass) |
| Add algorithm node. More... | |
| AlgorithmNode * | getAlgorithmNode (const std::string &algoName) const |
| Get the AlgorithmNode from by algorithm name using graph index. More... | |
| StatusCode | addDecisionHubNode (Algorithm *daughterAlgo, const std::string &parentName, concurrency::Concurrent, concurrency::PromptDecision, concurrency::ModeOr, concurrency::AllPass, concurrency::Inverted) |
| Add a node, which aggregates decisions of direct daughter nodes. More... | |
| unsigned int | getControlFlowNodeCounter () const |
| Get total number of control flow graph nodes. More... | |
| void | rankAlgorithms (IGraphVisitor &ranker) const |
| Rank Algorithm nodes by the number of data outputs. More... | |
| const std::string & | name () const override |
| Retrieve name of the service. More... | |
| SmartIF< ISvcLocator > & | serviceLocator () const override |
| Retrieve pointer to service locator. More... | |
| const std::chrono::system_clock::time_point | getInitTime () const |
| void | printState (std::stringstream &output, AlgsExecutionStates &states, const std::vector< int > &node_decisions, const unsigned int &recursionLevel) const |
| Print a string representing the control flow state. More... | |
| void | enableAnalysis () |
| BGL-based facilities. More... | |
| PRVertexDesc | node (const std::string &) const |
| std::string | dumpDataFlow () const |
| Print out all data origins and destinations, as reflected in the EF graph. More... | |
| std::string | dumpControlFlow () const |
| Print out control flow of Algorithms and Sequences. More... | |
| void | dumpPrecRules (const boost::filesystem::path &, const EventSlot &slot) |
| dump to file the precedence rules More... | |
| void | dumpPrecTrace (const boost::filesystem::path &) |
| dump to file the precedence trace More... | |
| void | addEdgeToPrecTrace (const AlgorithmNode *u, const AlgorithmNode *v) |
| set cause-effect connection between two algorithms in the precedence trace More... | |
| void | dumpControlFlow (std::ostringstream &, ControlFlowNode *, const int &) const |
 Public Member Functions inherited from CommonMessagingBase Public Member Functions inherited from CommonMessagingBase | |
| virtual | ~CommonMessagingBase ()=default |
| Virtual destructor. More... | |
| const SmartIF< IMessageSvc > & | msgSvc () const |
| The standard message service. More... | |
| MsgStream & | msgStream () const |
| Return an uninitialized MsgStream. More... | |
| MsgStream & | msgStream (const MSG::Level level) const |
| Predefined configurable message stream for the efficient printouts. More... | |
| MsgStream & | always () const |
| shortcut for the method msgStream(MSG::ALWAYS) More... | |
| MsgStream & | fatal () const |
| shortcut for the method msgStream(MSG::FATAL) More... | |
| MsgStream & | err () const |
| shortcut for the method msgStream(MSG::ERROR) More... | |
| MsgStream & | error () const |
| shortcut for the method msgStream(MSG::ERROR) More... | |
| MsgStream & | warning () const |
| shortcut for the method msgStream(MSG::WARNING) More... | |
| MsgStream & | info () const |
| shortcut for the method msgStream(MSG::INFO) More... | |
| MsgStream & | debug () const |
| shortcut for the method msgStream(MSG::DEBUG) More... | |
| MsgStream & | verbose () const |
| shortcut for the method msgStream(MSG::VERBOSE) More... | |
| MsgStream & | msg () const |
| shortcut for the method msgStream(MSG::INFO) More... | |
| MSG::Level | msgLevel () const |
| get the cached level (originally extracted from the embedded MsgStream) More... | |
| MSG::Level | outputLevel () const __attribute__((deprecated)) |
| Backward compatibility function for getting the output level. More... | |
| bool | msgLevel (MSG::Level lvl) const |
| get the output level from the embedded MsgStream More... | |
Additional Inherited Members | |
| Public Types inherited from CommonMessaging< IPrecedenceRulesGraph > | |
| using | base_class = CommonMessaging |
| Protected Member Functions inherited from CommonMessaging< IPrecedenceRulesGraph > | |
| MSG::Level | setUpMessaging () |
| Set up local caches. More... | |
| MSG::Level | resetMessaging () |
| Reinitialize internal states. More... | |
| void | updateMsgStreamOutputLevel (int level) |
| Update the output level of the cached MsgStream. More... | |
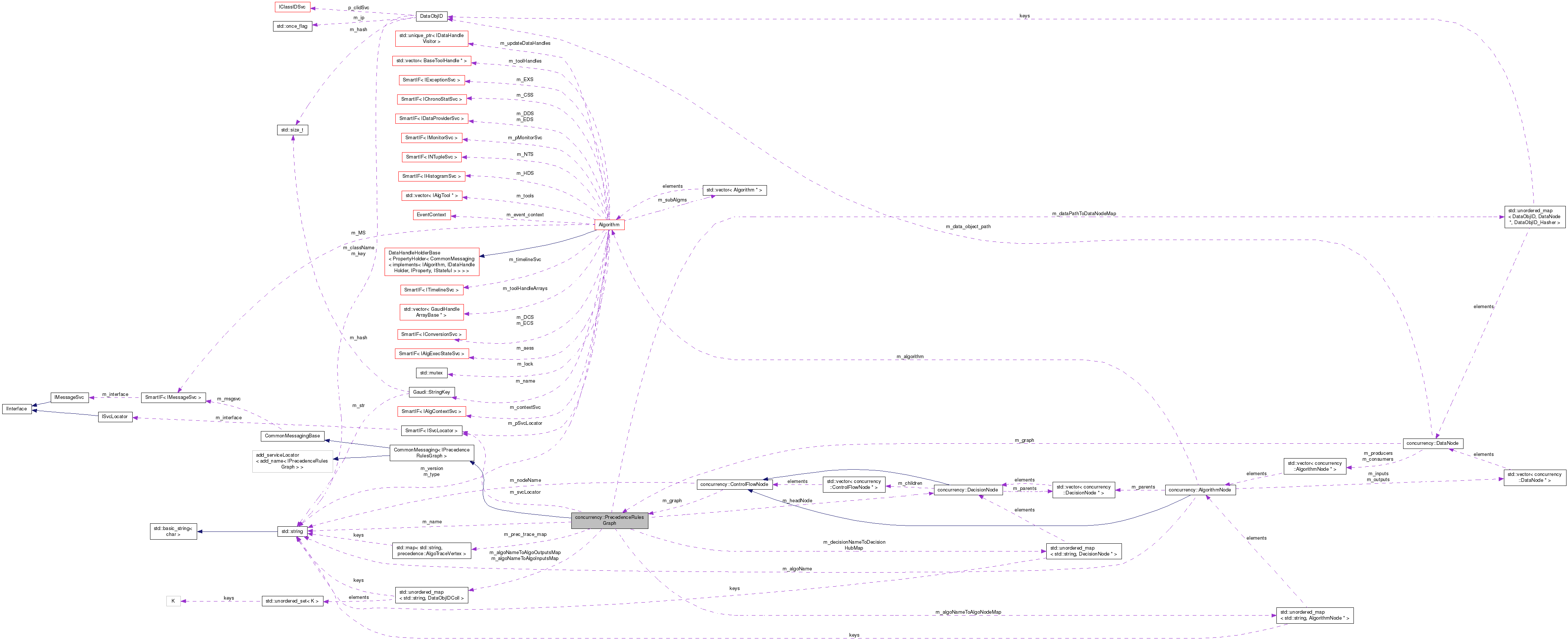
Definition at line 694 of file PrecedenceRulesGraph.h.
|
inline |
Constructor.
Definition at line 698 of file PrecedenceRulesGraph.h.
|
inlineoverride |
Destructor.
Definition at line 710 of file PrecedenceRulesGraph.h.
| void concurrency::PrecedenceRulesGraph::accept | ( | const std::string & | algo_name, |
| IGraphVisitor & | visitor | ||
| ) | const |
A method to update algorithm node decision, and propagate it upwards.
Definition at line 447 of file PrecedenceRulesGraph.cpp.
| StatusCode concurrency::PrecedenceRulesGraph::addAlgorithmNode | ( | Algorithm * | daughterAlgo, |
| const std::string & | parentName, | ||
| bool | inverted, | ||
| bool | allPass | ||
| ) |
Add algorithm node.
Definition at line 260 of file PrecedenceRulesGraph.cpp.
| StatusCode concurrency::PrecedenceRulesGraph::addDataNode | ( | const DataObjID & | dataPath | ) |
Add DataNode that represents DataObject.
Definition at line 312 of file PrecedenceRulesGraph.cpp.
| StatusCode concurrency::PrecedenceRulesGraph::addDecisionHubNode | ( | Algorithm * | daughterAlgo, |
| const std::string & | parentName, | ||
| concurrency::Concurrent | modeConcurrent, | ||
| concurrency::PromptDecision | modePromptDecision, | ||
| concurrency::ModeOr | modeOR, | ||
| concurrency::AllPass | allPass, | ||
| concurrency::Inverted | isInverted | ||
| ) |
Add a node, which aggregates decisions of direct daughter nodes.
Definition at line 359 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::addEdgeToPrecTrace | ( | const AlgorithmNode * | u, |
| const AlgorithmNode * | v | ||
| ) |
set cause-effect connection between two algorithms in the precedence trace
Definition at line 651 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::addHeadNode | ( | const std::string & | headName, |
| concurrency::Concurrent | modeConcurrent, | ||
| concurrency::PromptDecision | modePromptDecision, | ||
| concurrency::ModeOr | modeOR, | ||
| concurrency::AllPass | allPass, | ||
| concurrency::Inverted | isInverted | ||
| ) |
Add a node, which has no parents.
Definition at line 405 of file PrecedenceRulesGraph.cpp.
| StatusCode concurrency::PrecedenceRulesGraph::buildDataDependenciesRealm | ( | ) |
Build data dependency realm WITH data object nodes participating.
Definition at line 208 of file PrecedenceRulesGraph.cpp.
| std::string concurrency::PrecedenceRulesGraph::dumpControlFlow | ( | ) | const |
Print out control flow of Algorithms and Sequences.
Definition at line 464 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::dumpControlFlow | ( | std::ostringstream & | ost, |
| ControlFlowNode * | node, | ||
| const int & | indent | ||
| ) | const |
Definition at line 471 of file PrecedenceRulesGraph.cpp.
| std::string concurrency::PrecedenceRulesGraph::dumpDataFlow | ( | ) | const |
Print out all data origins and destinations, as reflected in the EF graph.
Definition at line 501 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::dumpPrecRules | ( | const boost::filesystem::path & | fileName, |
| const EventSlot & | slot | ||
| ) |
dump to file the precedence rules
Definition at line 529 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::dumpPrecTrace | ( | const boost::filesystem::path & | fileName | ) |
dump to file the precedence trace
Definition at line 615 of file PrecedenceRulesGraph.cpp.
|
inline |
BGL-based facilities.
Definition at line 764 of file PrecedenceRulesGraph.h.
| AlgorithmNode * concurrency::PrecedenceRulesGraph::getAlgorithmNode | ( | const std::string & | algoName | ) | const |
Get the AlgorithmNode from by algorithm name using graph index.
Definition at line 305 of file PrecedenceRulesGraph.cpp.
|
inline |
Get total number of control flow graph nodes.
Definition at line 744 of file PrecedenceRulesGraph.h.
Get DataNode by DataObject path using graph index.
Definition at line 352 of file PrecedenceRulesGraph.cpp.
|
inline |
Get head node.
Definition at line 734 of file PrecedenceRulesGraph.h.
|
inline |
Definition at line 754 of file PrecedenceRulesGraph.h.
| StatusCode concurrency::PrecedenceRulesGraph::initialize | ( | ) |
Initialize graph.
Definition at line 142 of file PrecedenceRulesGraph.cpp.
|
inlineoverride |
Retrieve name of the service.
Definition at line 750 of file PrecedenceRulesGraph.h.
| PRVertexDesc concurrency::PrecedenceRulesGraph::node | ( | const std::string & | name | ) | const |
Definition at line 430 of file PrecedenceRulesGraph.cpp.
|
inline |
Print a string representing the control flow state.
Definition at line 757 of file PrecedenceRulesGraph.h.
| void concurrency::PrecedenceRulesGraph::rankAlgorithms | ( | IGraphVisitor & | ranker | ) | const |
Rank Algorithm nodes by the number of data outputs.
Definition at line 453 of file PrecedenceRulesGraph.cpp.
| void concurrency::PrecedenceRulesGraph::registerIODataObjects | ( | const Algorithm * | algo | ) |
Register algorithm in the Data Dependency index.
Definition at line 187 of file PrecedenceRulesGraph.cpp.
|
inlineoverride |
Retrieve pointer to service locator.
Definition at line 752 of file PrecedenceRulesGraph.h.
|
private |
Total number of algorithm nodes in the graph.
Definition at line 796 of file PrecedenceRulesGraph.h.
|
private |
Indexes: maps of algorithm's name to algorithm's inputs/outputs.
Definition at line 790 of file PrecedenceRulesGraph.h.
|
private |
Index: map of algorithm's name to AlgorithmNode.
Definition at line 784 of file PrecedenceRulesGraph.h.
|
private |
Definition at line 791 of file PrecedenceRulesGraph.h.
|
private |
Enable conditions realm of precedence rules.
Definition at line 812 of file PrecedenceRulesGraph.h.
|
private |
Index: map of data path to DataNode.
Definition at line 788 of file PrecedenceRulesGraph.h.
|
private |
Index: map of decision's name to DecisionHub.
Definition at line 786 of file PrecedenceRulesGraph.h.
|
private |
Definition at line 807 of file PrecedenceRulesGraph.h.
|
private |
the head node of the control flow graph
Definition at line 782 of file PrecedenceRulesGraph.h.
|
private |
Definition at line 802 of file PrecedenceRulesGraph.h.
|
private |
Definition at line 800 of file PrecedenceRulesGraph.h.
|
private |
Total number of nodes in the graph.
Definition at line 794 of file PrecedenceRulesGraph.h.
|
private |
Definition at line 806 of file PrecedenceRulesGraph.h.
|
private |
facilities for algorithm precedence tracing
Definition at line 805 of file PrecedenceRulesGraph.h.
|
private |
BGL-based graph of precedence rules.
Definition at line 809 of file PrecedenceRulesGraph.h.
|
mutableprivate |
Service locator (needed to access the MessageSvc)
Definition at line 799 of file PrecedenceRulesGraph.h.
 1.8.11
1.8.11 
