|
The Gaudi Framework
master (cc9a61f4)
|
|
The Gaudi Framework
master (cc9a61f4)
|
#include </builds/gaudi/Gaudi/GaudiHive/src/PRGraph/Visitors/Promoters.h>
Public Member Functions | |
| RunSimulator (EventSlot &slot, const Cause &cause) | |
| Constructor. | |
| bool | visitEnter (DecisionNode &) const override |
| bool | visit (DecisionNode &) override |
| bool | visitEnter (AlgorithmNode &) const override |
| bool | visit (AlgorithmNode &) override |
| void | reset () override |
| virtual bool | visit (DataNode &) |
| virtual bool | visit (ConditionNode &) |
| virtual bool | visitEnter (DataNode &) const |
| virtual bool | visitEnter (ConditionNode &) const |
| Public Member Functions inherited from concurrency::IGraphVisitor | |
| virtual | ~IGraphVisitor ()=default |
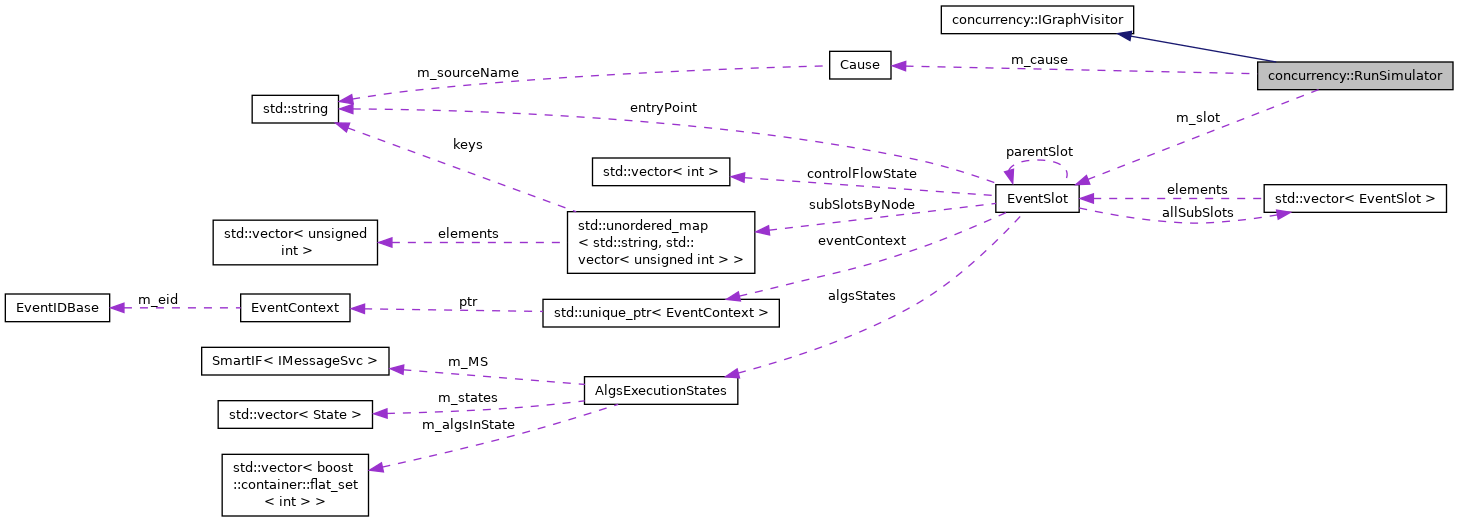
Public Attributes | |
| EventSlot * | m_slot |
| Cause | m_cause |
| int | m_nodesSucceeded { 0 } |
Definition at line 86 of file Promoters.h.
|
inlineoverridevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 102 of file Promoters.h.
|
overridevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 402 of file Promoters.cpp.
|
inlinevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 34 of file IGraphVisitor.h.
|
inlinevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 31 of file IGraphVisitor.h.
|
overridevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 361 of file Promoters.cpp.
|
overridevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 395 of file Promoters.cpp.
|
inlinevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 33 of file IGraphVisitor.h.
|
inlinevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 30 of file IGraphVisitor.h.
|
overridevirtual |
Reimplemented from concurrency::IGraphVisitor.
Definition at line 354 of file Promoters.cpp.
| Cause concurrency::RunSimulator::m_cause |
Definition at line 105 of file Promoters.h.
| int concurrency::RunSimulator::m_nodesSucceeded { 0 } |
Definition at line 106 of file Promoters.h.
| EventSlot* concurrency::RunSimulator::m_slot |
Definition at line 104 of file Promoters.h.