#include <src/PrecedenceRulesGraph.h>
Definition at line 201 of file PrecedenceRulesGraph.h.
Definition at line 202 of file PrecedenceRulesGraph.h.
211 log <<
MSG::WARNING <<
"Failed to locate EventDataSvc: no way to add DO " 212 <<
"states to the TTT dump " <<
endmsg;
219 log <<
MSG::WARNING <<
"Failed to locate CondSvc: no way to add Condition DO " 220 <<
"states to the TTT dump " <<
endmsg;
224 log <<
MSG::WARNING <<
"Event context is invalid: no way to add DO states" 225 <<
" in the TTT dump" <<
endmsg;
Definition of the MsgStream class used to transmit messages.
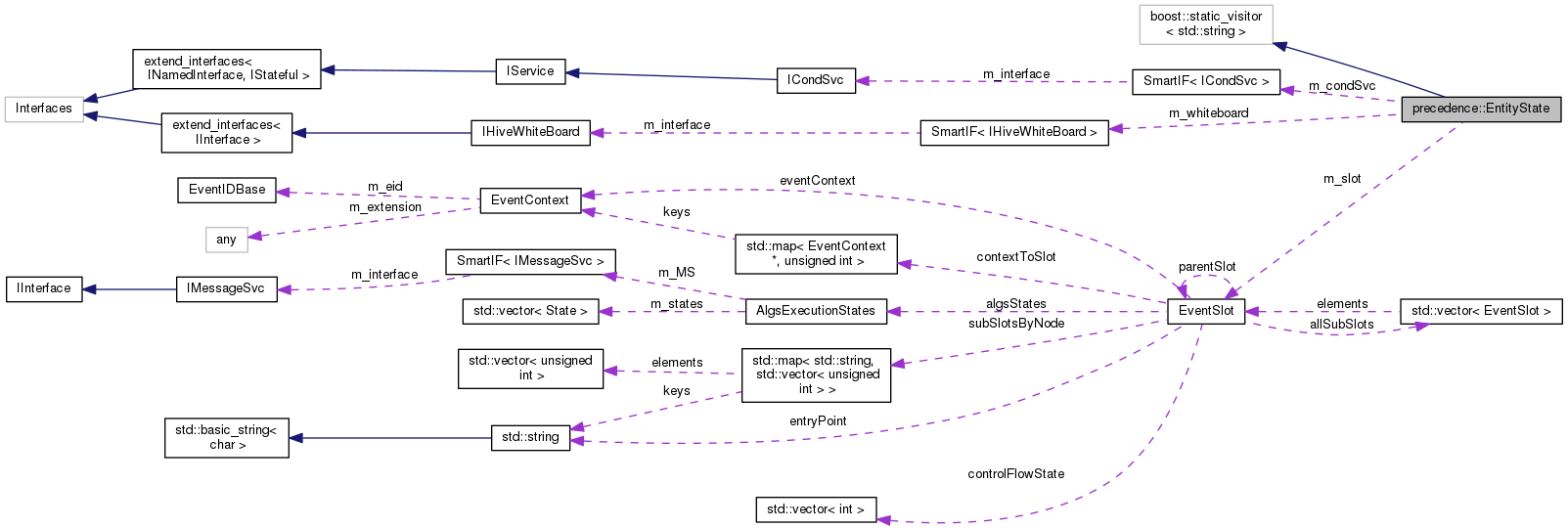
EventContext * eventContext
Cache for the eventContext.
StatusCode service(const Gaudi::Utils::TypeNameString &name, T *&svc, bool createIf=true)
Templated method to access a service by name.
SmartIF< ICondSvc > m_condSvc
Interface for the Condition Service.
SmartIF< IHiveWhiteBoard > m_whiteboard
bool isValid() const
Allow for check if smart pointer is valid.
MsgStream & endmsg(MsgStream &s)
MsgStream Modifier: endmsg. Calls the output method of the MsgStream.
Definition at line 237 of file PrecedenceRulesGraph.h.
EventContext * eventContext
Cache for the eventContext.
virtual bool exists(const DataObjID &)=0
Check if a data object exists in store.
virtual StatusCode selectStore(size_t partitionIndex)=0
Activate an given 'slot' for all subsequent calls within the same thread id.
SmartIF< IHiveWhiteBoard > m_whiteboard
bool isValid() const
Allow for check if smart pointer is valid.
Definition at line 248 of file PrecedenceRulesGraph.h.
EventContext * eventContext
Cache for the eventContext.
SmartIF< ICondSvc > m_condSvc
virtual bool isValidID(const EventContext &ctx, const DataObjID &id) const =0
check to see if a specific condition object ID is valid for this event
bool isValid() const
Allow for check if smart pointer is valid.
| bool precedence::EntityState::m_conditionsEnabled {false} |
The documentation for this struct was generated from the following file:
 1.8.11
1.8.11 
